物理科学与工程学院/上海自主智能无人系统科学中心任捷教授团队在智能机器人形态优化与闭环实验-算法一体化设计方面取得重要进展。研究提出一种以“俄罗斯方块(Tetris)”为灵感的可制造编码,结合混合贝叶斯优化与实体实验闭环的新框架,能在有限的硬件预算内快速“进化”出高性能机器人形态。相关成果以“Closed‑Loop Optimization of Tetris‑Inspired Robotic Morphology Evolution”为题发表于《Materials & Design》。
形状也能当“发动机”。同济大学团队把“像玩俄罗斯方块那样拼形状”的思路引入机器人外形设计,搭建“设计—3D打印—实验—学习”的闭环优化平台(如图1所示),在30轮内将振动驱动小机器人的最高速度提升68.7%(至25.27 mm/s),并同步开源代码与数据。
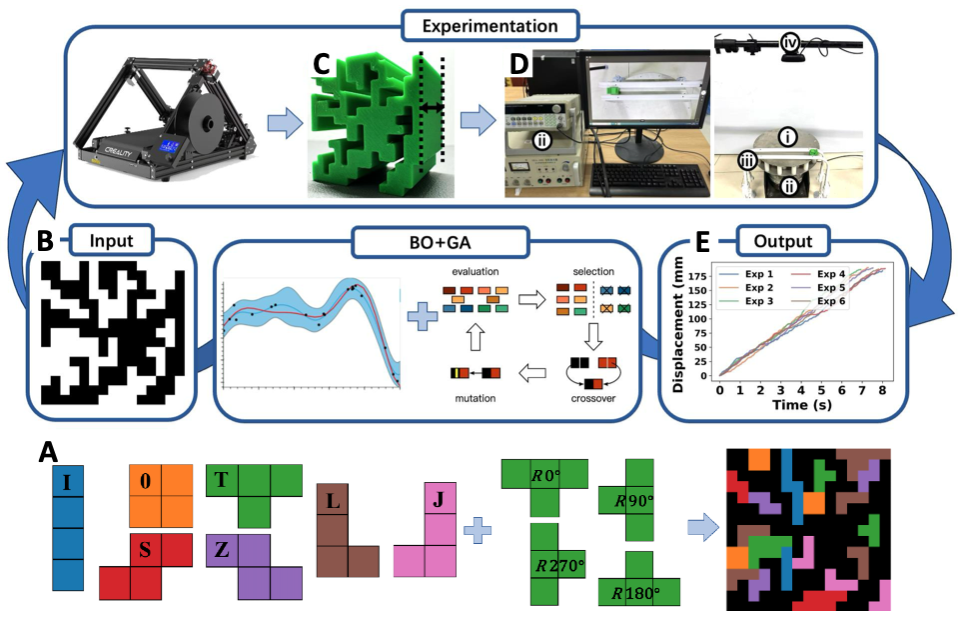
图1 闭环优化流程与实验平台示意。
机器人“长什么样”直接决定它能跑多快,但离散高维的形态空间与昂贵的实体测试,让传统试错和纯仿真效率受限。工作采用“算法—实体实验”闭环:在统一外场激励下,单轴竖直振动台(62 Hz)配合23 mm导轨限定单自由度直线运动,快速完成“形态→打印→测试→数据回流”循环,实测数据持续校准模型并驱动下一轮搜索。
团队在表示、算法与实验三个层面形成协同创新:其一,提出 Tetris 多方块可制造编码,在15×15 网格用 25 个多方块拼形,并在生成阶段嵌入边界/不重叠/连通/静稳规则,使可行设计率由<0.1% 提升至 ≈15.8%;其二,构建离散友好的混合贝叶斯优化——随机森林代理配合自适应随机蒙特卡洛探索与约束遗传算法细化,在约 280 组“形态—性能”样本下快速收敛;其三,打造“硬件在环”平台,将实测数据实时写回模型,抑制预测漂移并保障高吞吐。
机制分析显示,高性能形态呈“前肢—躯干—尾部”三段式:前缘保留材料利于起步,尾部适度“削空”(≈30–40%)以降阻并形成杠杆效应。高速成像观测到尾部可抬升约2.1 mm;考虑±5%制造扰动后,最优形态仍保持约20 mm/s的均值速度,表现稳健。
该框架与硬件、材料解耦,并在Trap 64等基准上复现优势,未来可扩展至柔性致动器、力学超材料等“用有限积木拼高性能”的场景。
同济大学智能科学与技术交叉学科博士研究生王宇倩为论文第一作者,任捷教授为通讯作者。对论文具有突出贡献的合作者还包括同济大学本科生韩昕怡、刘继奥、汪明阳、王吉晟、周远豪。近年来,任捷教授团队在人工智能×物理学的学科交叉方面取得了一系列进展,包括基于流形扩散的无监督学习对拓扑物态的分类、多目标优化的二维功能材料与器件设计、辐射制冷人工微结构设计、神经网络自编码逆向设计拓扑光学传感结构、基于伪逆学习的光电混合的神经网络、人工智能新范式设计多孔介质、药物设计、超低热导材料等,并受邀为中国物理学会的《物理学报》撰写“物理启发的人工智能”相关综述,相关成果形成了一套具有自主知识产权的计算机软件著作权Darwin Machine for Multi-Functional Meta-Crystal Design Platform。
论文链接(ScienceDirect):
https://www.sciencedirect.com/science/article/pii/S0264127525009530;数据与代码:Zenodo 10.5281/zenodo.14978583(MIT许可)。
 学校首页
学校首页 人才招聘
人才招聘 EN
EN 搜索
搜索



